煙囪及建築物座標系統之旋轉計算
Table of contents
背景
- 地圖數位板作業的結果是經緯度座標、而作為煙流模式前處理BPIP的輸入檔,必須是沒有歪斜的XY直角座標系統,需要進一步轉換。
- 尤有進者,實際個案的工廠北或多或少都會與背景地圖的真北有所偏差(夾角D),因此都必須進行平移及旋轉,才能適用該前處理程式,並且不會發生疊圖誤差。
- 煙流模式對於風向是非常敏感的,風向的0度是真北,因此夾角D對煙流地面濃度的走向、建築物的影響等等,都有絕對的影響。經由數位板與此處的計算,可以降低量測與計算造成誤差的可能性。
- 除此之外,程式還提供由背景資料中找到個案所在地的煙囪基地高程E(步驟5)、煙囪頂的離地高度H(步驟6)等功能,以便進行計算。
輸入檔
- 此處設定為KML格式檔案,範例如example.kml
- 使用KML格式的理由詳見討論
輸入檔說明
- 必須資訊
- 煙囪位置(點):將做為模擬個案之中心座標
- 囪煙名稱:此名稱將做為下述應用的個案名稱,
- 污染源名稱、
- 模式輸出檔案名稱
- 氣象檔案名稱(適用於同一3Km網格範圍的其他個案)
- 輔助資訊
- 建築物頂點位置(多邊形):方向不拘
- 建築物名稱(含高度、名稱高度間可以空格、逗號、分號、斜槓等區格)
- 煙囪如有高度跟在名稱之後,將會優先使用,否則會從TEDS資料庫中選取位置最接近的煙囪。
- 可以使用數位板點取座標值(詳見地圖數位板、另存成KML檔案)。
- 檢核:
- rotate_kml→旋轉角度,輸出成bpip輸入檔格式
- iscParser→解讀bpip輸入檔,輸出成kml格式(反解)
- KML內之順序:(不限)
- 高度附掛單位(m or M)不影響計算,一律設定是m
CGI_Python程式設計
旋轉平移
- 對某一點旋轉座標:參考網友之程式碼
- 同一副程式應用在isc_parser.py系列、rd_kmlFull.py系列。
10 def rotate_about_a_point(target_point,center_point,angle_rs):
11 cp=np.subtract(target_point,center_point)
12 px=cp[0]*math.cos(math.radians(angle_rs))+cp[1]*-math.sin(math.radians(angle_rs))
13 py=cp[0]*math.sin(math.radians(angle_rs))+cp[1]*math.cos(math.radians(angle_rs))
14 return(np.add([px,py],center_point))
- 先審視是否太過偏斜:
- 絕大工廠的廠房都是矩形,此處設定偏斜的標準為各建築物4面之角度的標準偏差>10度 (第75行)
69 dir=np.zeros(shape=(nplgs,4))
70 for i in range(nplgs):
71 diri=[90-math.atan2((y[i,j+1]-y[i,j]),(x[i,j+1]-x[i,j]))*180/math.pi for j in range(4)]
72 diri.sort()
73 # from North and clockwise
74 dir[i,:]=np.array(diri)
75 if max( [np.std(dir[:,j]) for j in range(4)])>10:
76 print ('wrong direction or skewed!</br>')
77 for i in range(nplgs):
78 print (('dir for building# {:d} is: {:f} {:f} {:f} {:f}</br>').format(i,*dir[i,:]))
79 print ('</body></html>')
80 sys.exit('wrong direction or skewed!')
- 找到最小旋轉角度
- 針對原點(KML輸入檔案的第1點,第85行)、做旋轉(第86行)、再做平移(89~90行)
82 P=[(i,j) for i,j in zip(x[:,:4].flatten(),y[:,:4].flatten())]
83 angl= min([np.mean(dir[:,j]) for j in range(4)])
84 if angl<0:angl+=360.
85 orig=P[0]
86 Pn=[rotate_about_a_point(pnt,orig,angl) for pnt in P]
87 Pn=np.array(Pn).flatten().reshape(nplgs,4,2)
88 #mnx, mny=(np.min(Pn[:,:,i]) for i in range(2))
89 Pn[:,:,0]+=-orig[0] #-mnx
90 Pn[:,:,1]+=-orig[1] #-mny
重整點位順序
- 校正數位化造成的不準度
- 讓bpip.inp內建築物的頂點為西南開始,逆時針順序輸入
- 找到最接近0點的頂點,做為原點,並補足每一點的不準度偏差(dx,dy)
- 煙囪點也同樣旋轉、平移(但沒有校正不準度)
92 for i in range(nplgs):
93 xm,ym=np.mean(Pn[i,:,0]),np.mean(Pn[i,:,1])
94 x1=sum([Pn[i,j,0] for j in range(4) if Pn[i,j,0] < xm])/2
95 x2=sum([Pn[i,j,0] for j in range(4) if Pn[i,j,0] > xm])/2
96 y1=sum([Pn[i,j,1] for j in range(4) if Pn[i,j,1] < ym])/2
97 y2=sum([Pn[i,j,1] for j in range(4) if Pn[i,j,1] > ym])/2
98 Pn[i,0,0],Pn[i,3,0]=x1,x1
99 Pn[i,1,0],Pn[i,2,0]=x2,x2
100 Pn[i,0,1],Pn[i,1,1]=y1,y1
101 Pn[i,2,1],Pn[i,3,1]=y2,y2
102 if i==0:
103 dist=(Pn[i,:,0])**2+(Pn[i,:,1])**2
104 idx=np.where(dist==np.min(dist))
105 dx,dy=-Pn[i,idx[0],0],-Pn[i,idx[0],1]
106 Pn[:,:,0]=Pn[:,:,0]+dx
107 Pn[:,:,1]=Pn[:,:,1]+dy
...
122 x,y=pnyc(lonp,latp, inverse=False)
123 x+=Xcent
124 y+=Ycent
125 P=[(i,j) for i,j in zip(x,y)]
126 Pp=[rotate_about_a_point(pnt,orig,angl) for pnt in P]
127 Pp=np.array(Pp).flatten().reshape(npnts,2)
128 Pp[:,0]+=-orig[0] #-mnx
129 Pp[:,1]+=-orig[1] #-mny
從既有資料庫中找到需要的數據
- 基地高程:使用UCAR 333M解析度檔案(WPS之geo_em格式)
36 geo_name='/Users/WRF4.1/WPS/geo_em.d04_333m.nc'
...
108 nc = netCDF4.Dataset(geo_name, 'r')
109 v='HGT_M'
110 c=np.array(nc.variables[v][0,:,:])
111 for v in ['CLAT','CLONG']:
112 exec(v+'=nc.variables[v][0,:,:]')
113 xg,yg=pnyc(CLONG,CLAT, inverse=False)
114 xg+=Xcent
115 yg+=Ycent
116 base=[]
117 for ii in range(nplgs):
118 i=ii*4
119 d=(xg-P[i][0])*(xg-P[i][0])+(yg-P[i][1])*(yg-P[i][1])
120 idx=np.where(d==np.min(d))
121 base.append(c[idx[0][0],idx[1][0]])
- 從TEDS資料庫中找到煙囪高度
37 tedsp_name=WEB+'isc_results/point_QC.csv'
...
131 #the stack heights are read from TEDS database IF that hgts are not contained in the name strings
132 df=read_csv(tedsp_name)
133 df.UTM_E+=Xcent
134 df.UTM_N+=Ycent
135 a=[]
136 for ll in range(1,6):
137 L=ll*1000
138 a=df.loc[df.UTM_E.map(lambda s:abs(s-P[0][0])<L) & df.UTM_N.map(lambda s:abs(s-P[0][1])<L)]
139 if len(a)>0:
140 df=a
141 break
142 if len(a)==0:
143 print ('the point source seems not existing in database. </body></html>')
144 sys.exit('fail')
145 cole=['CO_EMI', 'NMHC_EMI', 'NOX_EMI', 'PM25_EMI', 'PM_EMI', 'SOX_EMI']
146 c2m={'SOX':64,'NOX':46,'CO':28,'PM25':24.5,'PM':24.5,'NMHC':12*4+10}
147 unit={i:'ppb' for i in c2m if 'PM' not in i}
148 unit.update({i:'ug/m3' for i in c2m if 'PM' in i})
149 hdtv=[ 'HEI', 'DIA', 'TEMP', 'VEL']
150 tims=[ 'DY1', 'HD1', 'HY1']
151 for v in cole+hdtv+tims:
152 exec(v+'=[]')
153 for k in range(npnts):
154 df['dist']=[np.sqrt((i-P[k][0])**2+(j-P[k][1])**2) for i,j in zip(list(df.UTM_E),list(df.UTM_N))]
155 idx=df.loc[df.dist==min(df.dist)].index
156 if len(idx)>1:
157 idx=df.loc[idx].sort_values('HEI',ascending=False).head(1).index
158 for v in cole+hdtv+tims:
159 exec(v+'.append(list(df.'+v+'[idx])[0])')
160 if len(hgts)<nplgs+npnts:
161 hgts.append(list(df.HEI[idx])[0])
162 for v in cole:
163 exec(v+'=['+v+'[i]/HY1[i]/3.6*1000. for i in range(npnts)]')
164 TEMP=[i+273 for i in TEMP]
輸出到bpip.inp檔案
- 命名為fort.10,以符合BPIP程式的約定。以隨機產生的目錄名稱做為使用者個案間的辨識。
172 with open(pth+'fort.10','w') as f:
173 f.write(("'BPIP input file with "+'{:2d}'+' bldg and '+'{:2d}'+" stacks,originated at [{:.1f},{:.1f}](TWD97m).'\n")
174 .format(nplgs,npnts,orig[0],orig[1]))
175 f.write(("'P'\n"+"'METERS' 1.00\n'UTMN',"+'{:5.0f}\n').format(angl))
176 f.write(('{:2d}\n').format(nplgs))
177 for i in range(nplgs):
178 f.write(("'"+names[i]+"' 1"+'{:6.1f}\n').format(base[i]))
179 f.write(('4 '+'{:5.0f}\n').format(hgts[i]))
180 for j in range(4):
181 f.write(('{:5.1f} {:5.1f}\n').format(Pn[i,j,0],Pn[i,j,1]))
182 f.write(('{:2d}\n').format(npnts))
183 for i in range(npnts):
184 ii=i+nplgs
185 f.write(("'"+names[ii]+"' "+'{:6.1f} {:6.1f} {:6.1f} {:6.1f} \n').format(base[ii],hgts[ii],Pp[i,0],Pp[i,1]))
CGI_Python下載
RESULTS
CaaS
結果檢視
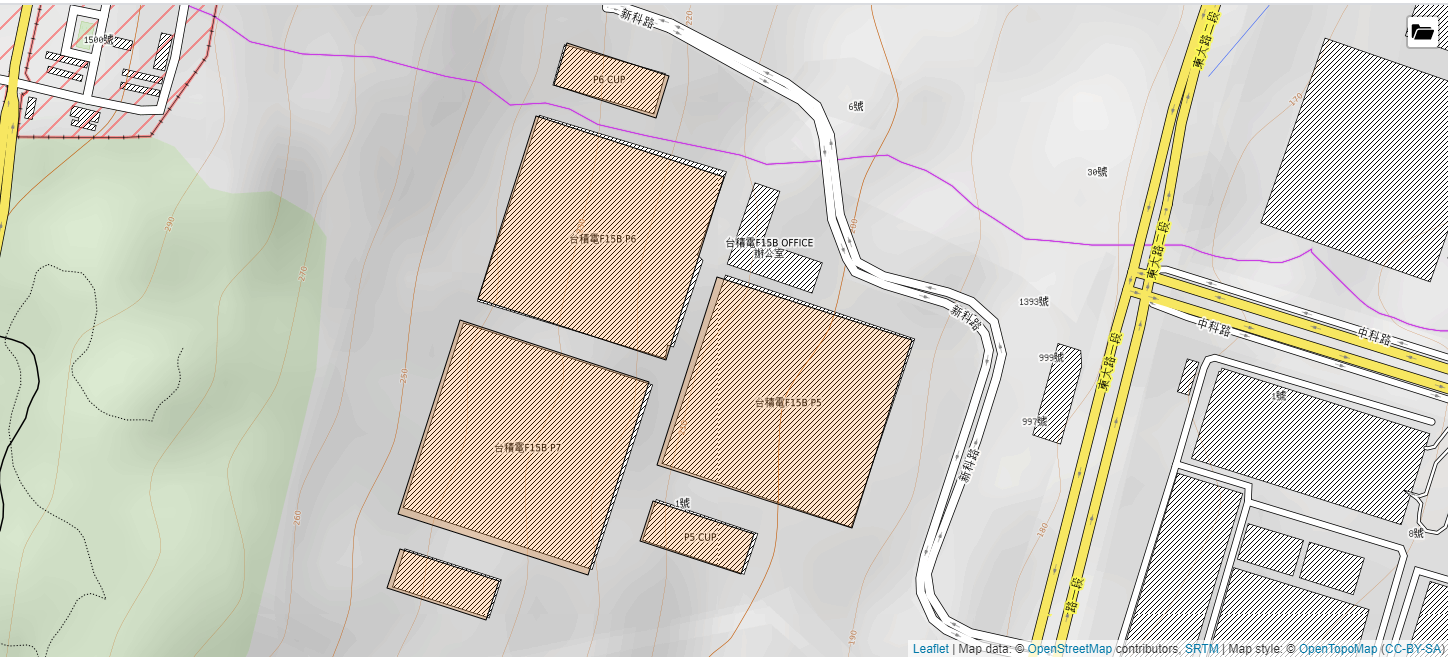 |
|---|
| 數位化、且經旋轉、歪斜修正後的廠房位置圖 |
Reference
- Mathematics Stack Exchange, calculate new positon of rectangle corners based on angle